Ship
Active vessel
Instance Properties:
native: Vessel - [Unsafe] NativeVesselfor unrestricted access to KSP API. Same asFlightGlobals.ActiveVesselif accessed through globalship.name: string - Name of the ship (vehicle/vessel).target: Object - [WIP] Target of active ship. Null if none.autopilot: Autopilot - Autopilot of this ship (vehicle/vessel).throttle: float - Current throttle (assign redirects toAutopilot, reads control state if autopilot disabled)controllable: bool - Indicator that ship is controllable.parts: ShipPartSet - All parts of this ship/vessel/vehicle.root: Part - Root part (same asparts.root).controlPart: Part - Controlling part (same asparts.control).nextDecoupler: LinkPart - One of the decouplers that will get activated by nearest stage. (Same asParts.NextDecoupler.)nextDecouplerStage: int - Stage number of the nearest decoupler or -1. (Same asParts.NextDecouplerStage.)currentStage: int - Current stage number. (Same asstage.numberif active ship.)stages: Stages - [WIP] Parts per stage (bydecoupledin+1).decouplers: ReadOnlyList[LinkPart] - List of all decouplers, separators, launch clamps and docks with staging. (Docking ports without staging enabled not included.)dockingports: ReadOnlyList[DockingPort] - List of all docking ports (regardless of staging).engines: EngineSet - All engines (regardless of state).sensors: ReadOnlyList[Sensor] - All sensors.science: ReadOnlyList[PartScience] - [WIP] All science modules.id: Guid - Unique identifier of the ship (vehicle/vessel). Can change when docking/undocking.persistentId: uint - Unique identifier of the ship (vehicle/vessel). Should be same as it was before docking (after undocking).vesseltype: VesselType - KSP API. Vessel type as selected by user (or automatically).mass: double - Total mass of the ship (vehicle/vessel). [tons = 1000 kg]packed: bool - Wheter the ship is still packed (reduced physics).landed: bool - Wheter the ship is landed (on the ground or on/in water).splashed: bool - Wheter the ship is in water.prelaunch: bool - Ship is on launch-pad.situation: Situations - KSP API. Current situation.longitude: double - Longitude of current position in degrees.latitude: double - Latitude of current position in degrees.altitude: double - Altitude of current position (above sea level) in meters.radarAltitude: double - True height above ground in meters.dynamicPressure: double - Dynamic pressure [atm = 101.325kPa]q: double - Dynamic pressure [atm = 101.325kPa]body: SpaceBody - Orbited body.orbit: OrbitInfo - [WIP] Orbit parameters.period: TimeDelta - Period of current orbit in seconds. Alias toorbit.period.timeToAp: TimeDelta - Eta to apoapsis in seconds. Alias toorbit.timeToAp.timeToPe: TimeDelta - Eta to periapsis in seconds. Alias toorbit.timeToPe.timeAtAp: TimeStamp - Time at apoapsis. Alias toorbit.timeAtAp.timeAtPe: TimeStamp - Time at periapsis. Alias toorbit.timeAtPe.eccentricity: double - Eccentricity of current orbit. [0, +inf)inclination: double - Inclination of current orbit. [0, 180)semiMajorAxis: double - Semi-major axis of current orbit.semiMinorAxis: double - Semi-minor axis of current orbit.apoapsis: double - Height above ground of highest point of current orbit.periapsis: double - Height above ground of lowest point of current orbit.apocenter: double - Highest distance between center of orbited body and any point of current orbit.(1 + eccentricity) * semiMajorAxispericenter: double - Lowest distance between center of orbited body and any point of current orbit.(1 - eccentricity) * semiMajorAxistrueAnomaly: double - Angle in degrees between the direction of periapsis and the current position. Zero at periapsis, 180 at apoapsis.meanAnomaly: double - Angle in degrees between the direction of periapsis and the current position extrapolated on circular orbit.lan: double - Longitude of ascending node.argumentOfPeriapsis: double - Argument of periapsis. Angle from ascending node to periapsis.aop: double - Argument of periapsis. Angle from ascending node to periapsis.position: Vector - Center of mass relative to (CoM of) active ship (zero for active ship).velocity: Vector - Current orbital velocity.surfaceVelocity: Vector - Current surface velocity.srfVelocity: Vector - Current surface velocity (Alias tosurfaceVelocity).srfvel: Vector - Current surface velocity (Alias tosurfaceVelocity).forward: Vector - Vector pointing forward (from cockpit - in the direction of the ‘nose’).back: Vector - Vector pointing backward (from cockpit - in the direction of the ‘tail’).up: Vector - Vector pointing up (from cockpit).down: Vector - Vector pointing down (from cockpit).left: Vector - Vector pointing left (from cockpit).right: Vector - Vector pointing right (from cockpit).north: Vector - Vector pointing north in the plane that is tangent to sphere centered in orbited body.east: Vector - Vector pointing east (tangent to sphere centered in orbited body).away: Vector - Vector pointing away from orbited body (aka up, but we useupfor cockpit-up).pitch: double - Current pitch / elevation (the angle between forward vector and tangent plane) [-90..+90]heading: double - Current heading / yaw (the angle between forward and north vectors in tangent plane) [0..360]. Note that it can change violently around the poles.roll: double - Current roll / bank (the angle between up and away vectors in the plane perpendicular to forward vector) [-180..+180]. Note that it can change violently when facing up or down.angularVelocity: Vector - Angular velocity [ω, deg/s], how fast the ship rotatesangularMomentum: Vector - Angular momentum [L = Iω, kg⋅m²⋅deg/s=N⋅m⋅s⋅deg] aka moment of momentum or rotational momentum.momentOfInertia: Vector - Moment of inertia [I, kg⋅m²=N⋅m⋅s²] aka angular mass or rotational inertia.maxTorque: Vector - Maximal ship torque [N⋅m⋅deg=deg⋅kg⋅m²/s²] (aka moment of force or turning effect, maximum of positive and negative).maxVacuumTorque: Vector - Maximal ship torque in vacuum [N⋅m⋅deg=deg⋅kg⋅m²/s²] (ignoring control surfaces).maxAngular: Vector - Maximal angular acceleration. [deg/s²]maxVacuumAngular: Vector - Maximal angular acceleration in vacuum (ignoring control surfaces).sas: bool - SAS: Stability Assist System.rcs: bool - RCS: Reaction Control System.
Instance Methods:
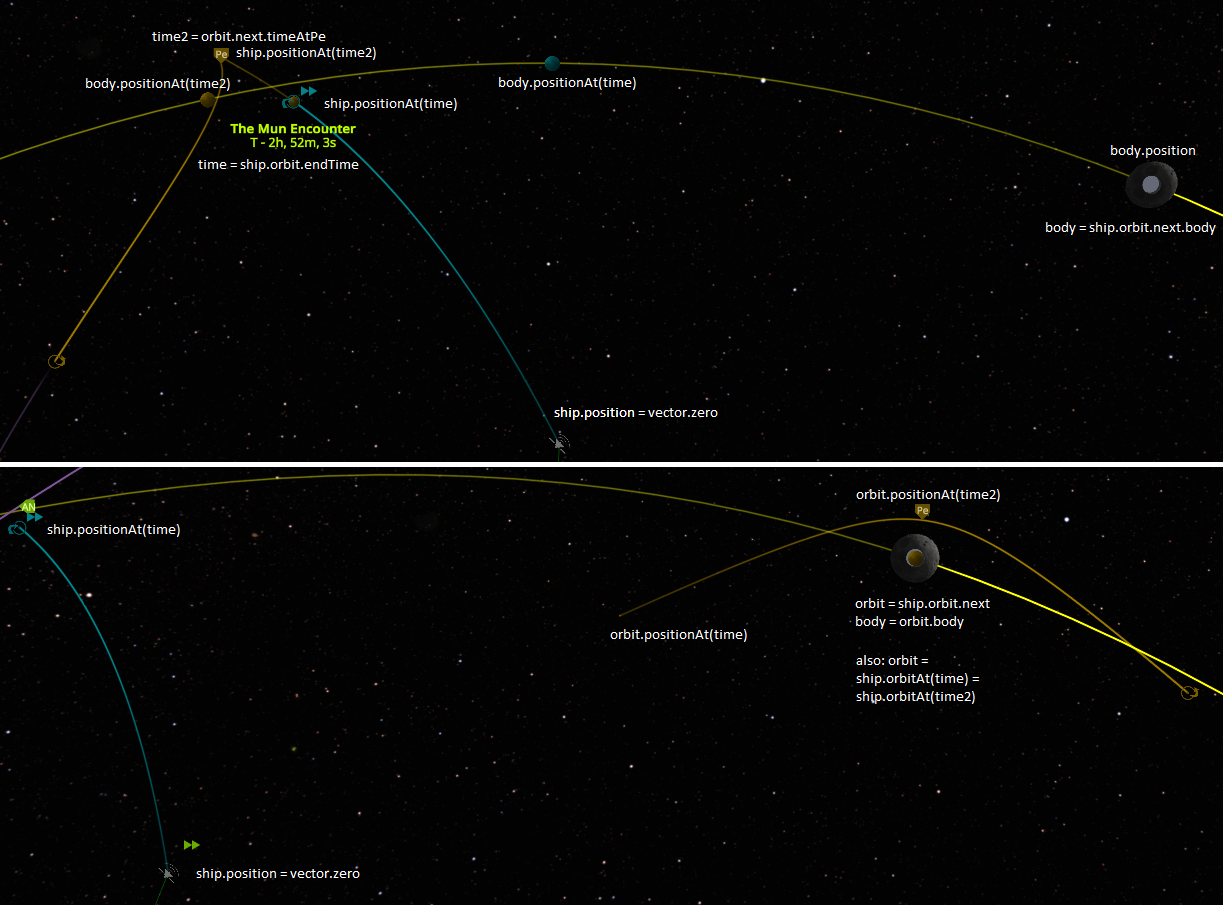
orbitAt(): OrbitInfo, time TimeStamp- [
WIP] Get orbit info relevant for given time. See orbit.png.
- [
positionAt(): Vector, time TimeStamp- [
WIP] Predicted position at specified time. Includes the movement of bodies (e.g. Mun or Ike) when ship is currently orbiting the (grand)parent (e.g. Kerbin or Sun/Kerbol). This method is trying to be reasonably smooth/continuous, useorbitAt(time).positionAt(time)if that is not desired. See orbit.png.
- [
velocityAt(): Vector, time TimeStamp- [
WIP] Predicted velocity at specified time. Includes the movement of bodies (e.g. Mun or Ike) when ship is currently orbiting the (grand)parent (e.g. Kerbin or Sun/Kerbol). This method is trying to be reasonably smooth/continuous, useorbitAt(time).velocityAt(time)if that is not desired. See orbit.png.
- [
local(): Vector, v Vector- Translate vector/direction into ship-local coordinates (like looking at it from the cockpit - or rather from the controlling part).
world(): Vector, v Vector- Translate vector/direction into world coordinates (reverse the
localtransformation).
- Translate vector/direction into world coordinates (reverse the
timeAtTrueAnomaly(): TimeStamp, trueAnomaly double- [
WIP] Get time at true anomaly (absolute time of angle from direction of periapsis).
- [
timeToTrueAnomaly(): TimeDelta, trueAnomaly double- [
WIP] Get time to true anomaly (relative time of angle from direction of periapsis). [0, period)
- [
{kind=link}